Determinator an operating system for deterministic parallel computing
Background
Determinator is an experimental multiprocessor, distributed OS that creates an environment in which anything an application computes is exactly repeatable. It consists of a microkernel and a set of user-space runtime libraries and applications. The microkernel provides a minimal API and execution environment, supporting a hierarchy of “shared-nothing” address spaces that can execute in parallel, but enforcing the guarantee that these spaces evolve and interact deterministically. Atop this minimal environment, Determinator's user-space runtime library uses distributed systems techniques to emulate familiar shared-state abstractions such as Unix processes, global file systems, and shared memory multithreading.
A subset of Determinator comprises PIOS (“Parallel Instructional Operating System”), a teaching OS derived from and providing a course framework similar to JOS, where students fill in missing pieces of a reference skeleton. Determinator/PIOS represents a complete redesign and rewrite of the core components of JOS. To our knowledge PIOS is the first instructional OS to include and emphasize increasingly important parallel/multicore and distributed OS programming practices in an undergraduate-level OS course. It was used to teach CS422: Operating Systems at Yale in Spring 2010, and is freely available for use and adaptation by others.
Determinator will also provide a starting point for a certified OS kernel project in collaboration with the FLINT research group.
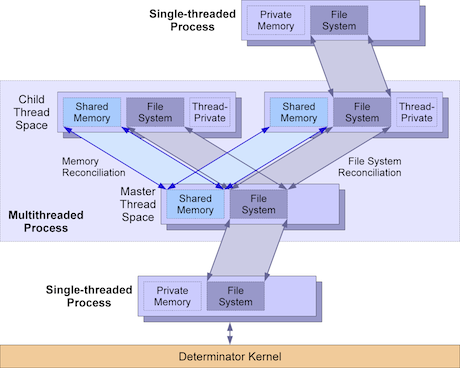 A multithreaded process built from one space per thread, with a master space managing synchronization and memory reconciliation
A multithreaded process built from one space per thread, with a master space managing synchronization and memory reconciliation
Conference Publications
- Deterministically Deterring Timing Attacks in Deterland, Weiyi Wu and Bryan Ford. TRIOS '15, October 4, 2015. Abstract PDF.
- GPUfs: Integrating a File System with GPUs, Mark Silberstein, Bryan Ford, Idit Keidar, and Emmett Witchel. ASPLOS '13, March 16-20, 2013. Abstract PDF. Slides: OpenOffice PDF. Journal version (TOCS): PDF Communications of the ACM article: Abstract PDF
- Efficient System-Enforced Deterministic Parallelism, Amittai Aviram, Shu-Chun Weng, Sen Hu, and Bryan Ford. Jay Lepreau Best Paper Award, OSDI '10. Abstract PDF. Slides: OpenOffice PDF. CACM Research Highlights version.
Workshop Publications
- Lazy Tree Mapping: Generalizing and Scaling Deterministic Parallelism, Yu Zhang and Bryan Ford. APSys '13, July 30, 2013. Abstract PDF
- Icebergs in the Clouds: the Other Risks of Cloud Computing, Bryan Ford. HotCloud '12, June 12, 2012. Abstract PDF Slides: OpenOffice PDF
- Plugging Side-Channel Leaks with Timing Information Flow Control, Bryan Ford. HotCloud '12, June 13, 2012. Abstract PDF Slides: OpenOffice PDF
- A Virtual Memory Foundation for Scalable Deterministic Parallelism, Yu Zhang and Bryan Ford. APsys '11. Abstract PDF.
- CertiKOS: A Certified Kernel for Secure Cloud Computing, Liang Gu, Alexander Vaynberg, Bryan Ford, Zhong Shao, and David Costanzo. APsys '11. Abstract PDF.
- Deterministic OpenMP for Race-Free Parallelism, Amittai Aviram and Bryan Ford. HotPar '11. Abstract PDF. Slides: OpenOffice PDF.
- Workspace Consistency: A Programming Model for Shared Memory Parallelism, Amittai Aviram, Bryan Ford, and Yu Zhang. WoDet '11. Abstract PDF.
- Determinating Timing Channels in Compute Clouds, Amittai Aviram, Sen Hu, Bryan Ford, and Ramakrishna Gummadi. CCSW '10. Abstract, PDF PS. Slides: OpenOffice PDF.
Source Code on GitHub
Lectures
- Deterministically Deterring Timing Attacks in Deterland, Bryan Ford. UMass Amherst, April 28, 2015. OpenOffice PDF
- System-Enforced Determinism: What Is It, How Practical Is It, and What’s It Good For?, Bryan Ford. University of Texas at Austin Colloquium, November 15, 2012. OpenOffice PDF
- Using System-Enforced Determinism to Control Timing Channels, Bryan Ford. ASPLOS PC Symposium, November 2, 2012. OpenOffice PDF
- Icebergs in the Clouds: the Other Risks of Cloud Computing, Bryan Ford. NSF Workshop on Security for Cloud Computing (panel talk), March 16, 2012. OpenOffice PDF
- Efficient System-Enforced Deterministic Parallelism,
Bryan Ford.
- Harvard Computer Science Colloquium, November 2011.
- IBM T.J. Watson Research Center, November 2010.
- Columbia University, November 2010.
- Harvard Computer Science Colloquium, November 2011.
PhD Theses
- Deterministic OpenMP, Amittai Aviram. PDF. Slides: OpenOffice PDF.
Drafts and Technical Reports
- Warding off timing attacks in Deterland, Weiyi Wu, Ennan Zhai, Daniel Jackowitz, David Isaac Wolinsky, Liang Gu, and Bryan Ford, April 2015. Preprint: Abstract PDF
- Auditing the Structural Reliability of the Clouds, Ennan Zhai, David Isaac Wolinsky, Hongda Xiao, Hongqiang Liu, Xueyuan Su, and Bryan Ford. YALEU/DCS/TR-1479, July 2013. PDF
- Determinating Mandelbrot: Adding Provider-Enforced Determinism to the Cloud, John Wood. Yale CS 490 project, May 2011. PDF (Yale-internal project page)